Fast Gaussian Process Models in STAN
As described in an earlier post, Gaussian process models are a fast, flexible tool for… Read More »Fast Gaussian Process Models in STAN
As described in an earlier post, Gaussian process models are a fast, flexible tool for… Read More »Fast Gaussian Process Models in STAN
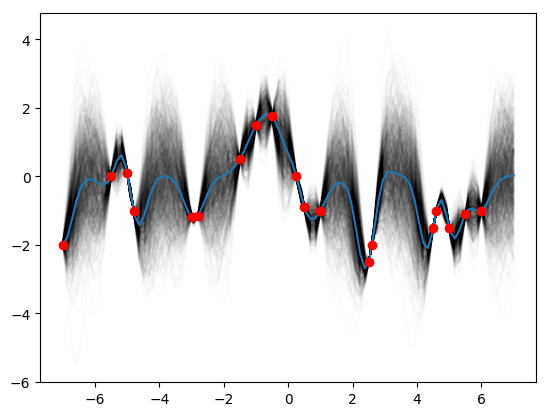
Gaussian Processes for Machine Learning by Rasmussen and Williams has become the quintessential book for learning… Read More »Gaussian Processes for Machine Learning in Python 1 Rasmussen and Williams – Chapter 2