An Efficient Algorithm for Estimating A-Ci parameters
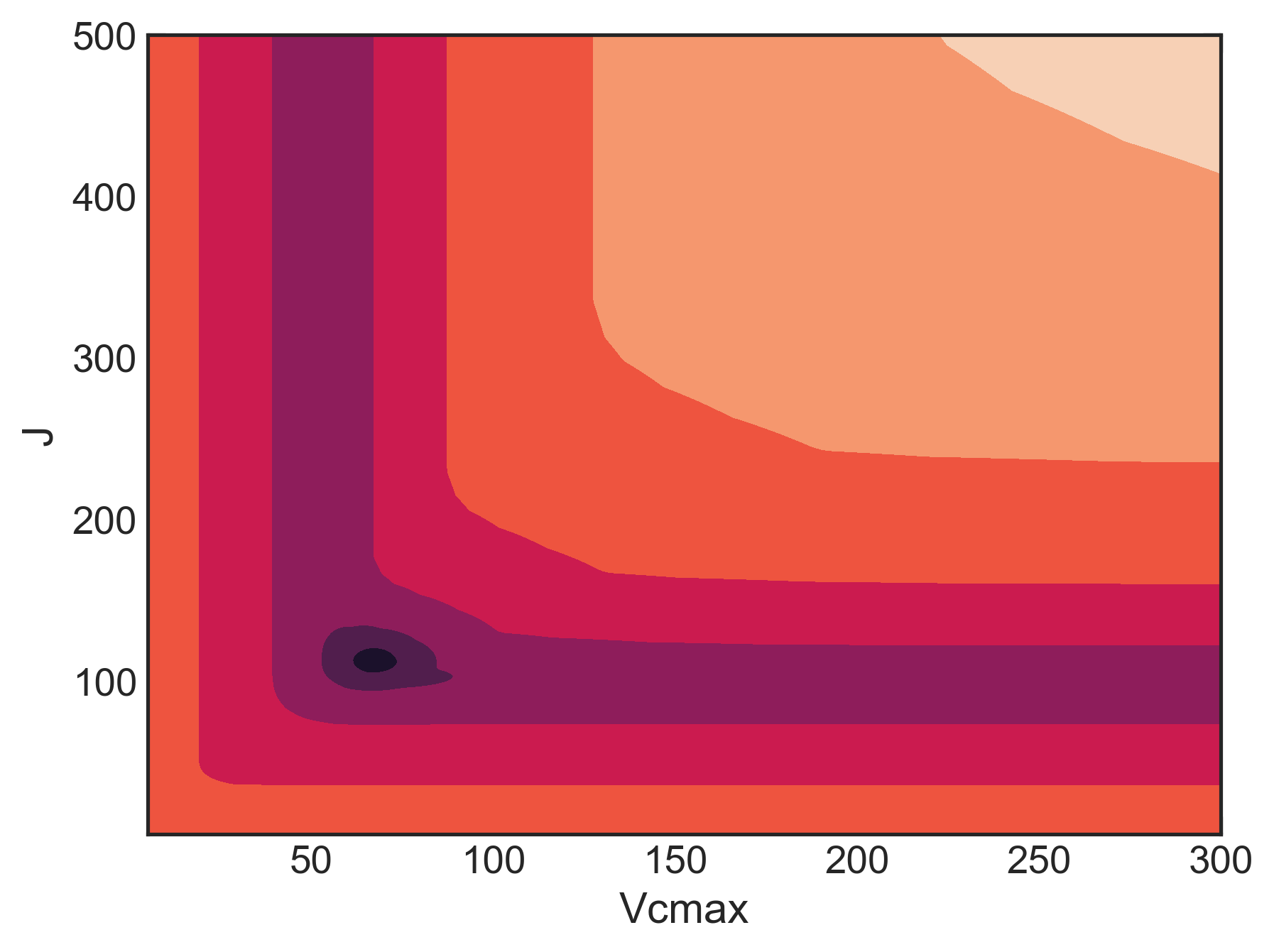
Foliar A/Ci curves, which relate carbon biochemistry to photosynthesis rates, provide an extraordinary amount of… Read More »An Efficient Algorithm for Estimating A-Ci parameters
Foliar A/Ci curves, which relate carbon biochemistry to photosynthesis rates, provide an extraordinary amount of… Read More »An Efficient Algorithm for Estimating A-Ci parameters
As described in an earlier post, Gaussian process models are a fast, flexible tool for… Read More »Fast Gaussian Process Models in STAN